- Function File: lsim (sys, u)
- Function File: lsim (sys1, sys2, …, sysN, u)
- Function File: lsim (sys1, 'style1', …, sysN, 'styleN', u)
- Function File: lsim (sys1, …, u, t)
- Function File: lsim (sys1, …, u, t, x0)
- Function File: [y, t, x] = lsim (sys, u)
- Function File: [y, t, x] = lsim (sys, u, t)
- Function File: [y, t, x] = lsim (sys, u, t, x0)
Simulate LTI model response to arbitrary inputs. If no output arguments are given, the system response is plotted on the screen.
Inputs
- sys
LTI model. System must be proper, i.e. it must not have more zeros than poles.
- u
Vector or array of input signal. Needs
length(t)rows and as many columns as there are inputs. If sys is a single-input system, row vectors u of lengthlength(t)are accepted as well.- t
Time vector. Should be evenly spaced. If sys is a continuous-time system and t is a real scalar, sys is discretized with sampling time
tsam = t/(rows(u)-1). If sys is a discrete-time system and t is not specified, vector t is assumed to be0 : tsam : tsam*(rows(u)-1).- x0
Vector of initial conditions for each state. If not specified, a zero vector is assumed.
- ’style’
Line style and color, e.g. ’r’ for a solid red line or ’-.k’ for a dash-dotted black line. See
help plotfor details.
Outputs
- y
Output response array. Has as many rows as time samples (length of t) and as many columns as outputs.
- t
Time row vector. It is always evenly spaced.
- x
State trajectories array. Has
length (t)rows and as many columns as states.
See also: impulse, initial, step.
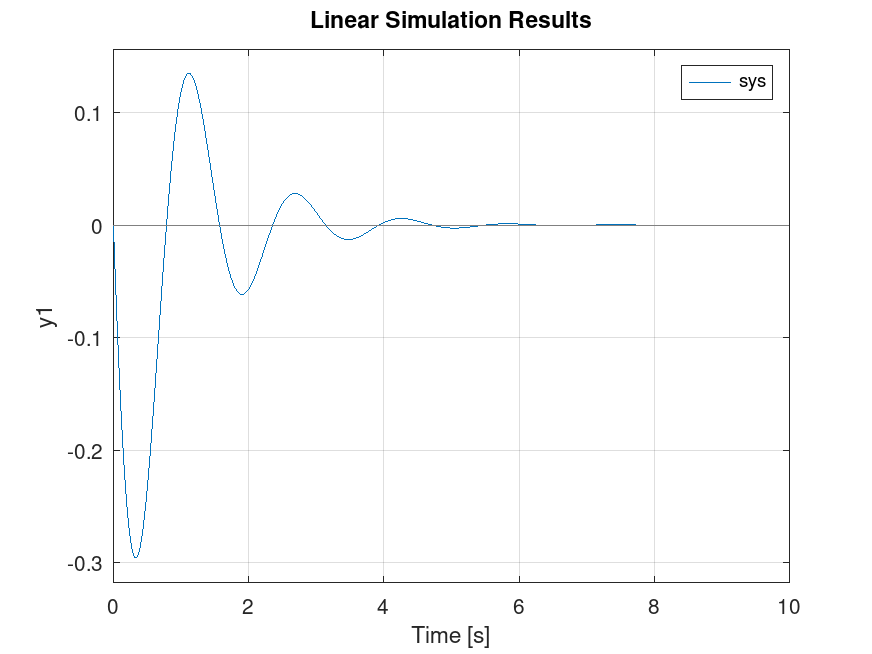
Demonstration 1
The following code
clf;
A = [-3 0 0;
0 -2 1;
10 -17 0];
B = [4;
0;
0];
C = [0 0 1];
D = 0;
sys = ss(A,B,C,D);
t = 0:0.01:10;
u = zeros (length(t) ,1);
x0 = [0 0.1 0];
lsim(sys, u, t, x0);
Produces the following figure
| Figure 1 |
|---|
 |
Package: control