
|
Octave-Forge - Extra packages for GNU Octave |
| Home · Packages · Developers · Documentation · FAQ · Bugs · Mailing Lists · Links · Code |
|
|
Octave-Forge - Extra packages for GNU Octave |
| Home · Packages · Developers · Documentation · FAQ · Bugs · Mailing Lists · Links · Code |
Function File: [J sigma]= rodmassmatrix (sigma,l, rho)
Mass matrix of one dimensional rod in 3D.
Let q be the configuration vector of the rod, with the first three elements of q being the spatial coordinates (e.g. x,y,z) and the second three elements of q the rotiational coordinates (e.g. Euler angles), then the kinetical energy of the rod is given by T = 1/2 (dqdt)^T kron(J,eye(3)) dqdt
sigma is between 0 and 1. Corresponds to the point in the rod that is being used to indicate the position of the rod in space. If sigma is a string then the value corresponding to the center of mass of the rod. This makes J a diagonal matrix. If sigma is a string the return value of sigma corresponds to the value pointing to the center of mass.
l is the length of the rod. If omitted the rod has unit length.
rho is a function handle to the density of the rod defined in the interval 0,1. The integral of this density equals the mass and is stored in J
(1,1). If omitted, the default is a uniform rod with unit mass.Run
demo rodmassmatrixto see some examples.
The following code
barlen = 2;
[Jc, s] = rodmassmatrix (0, barlen);
printf ("Inertia matrix from the extrema : \n")
disp (Jc)
printf ("Sigma value to calculate from center of mass : %g \n",s)
J = rodmassmatrix (s);
printf ("Inertia matrix from the CoM : \n")
disp (J)
J2 = rodmassmatrix ("com");
tf = all((J2 == J)(:));
disp (["Are J and J2 equal? " "no"*not(tf) "yes"*tf])
% ----------------------------------------------------------------------------
% This example shows the calculations for rod of length 2. First we place one
% of its extrema in the origin. Then we use the value of sigma provided by
% the function to do the same calculation form the center of mass.
Produces the following output
Inertia matrix from the extrema : 1.00000 1.00000 1.00000 1.33333 Sigma value to calculate from center of mass : 0.5 Inertia matrix from the CoM : 1.0000e+00 9.0206e-17 9.0206e-17 8.3333e-02 Are J and J2 equal?
The following code
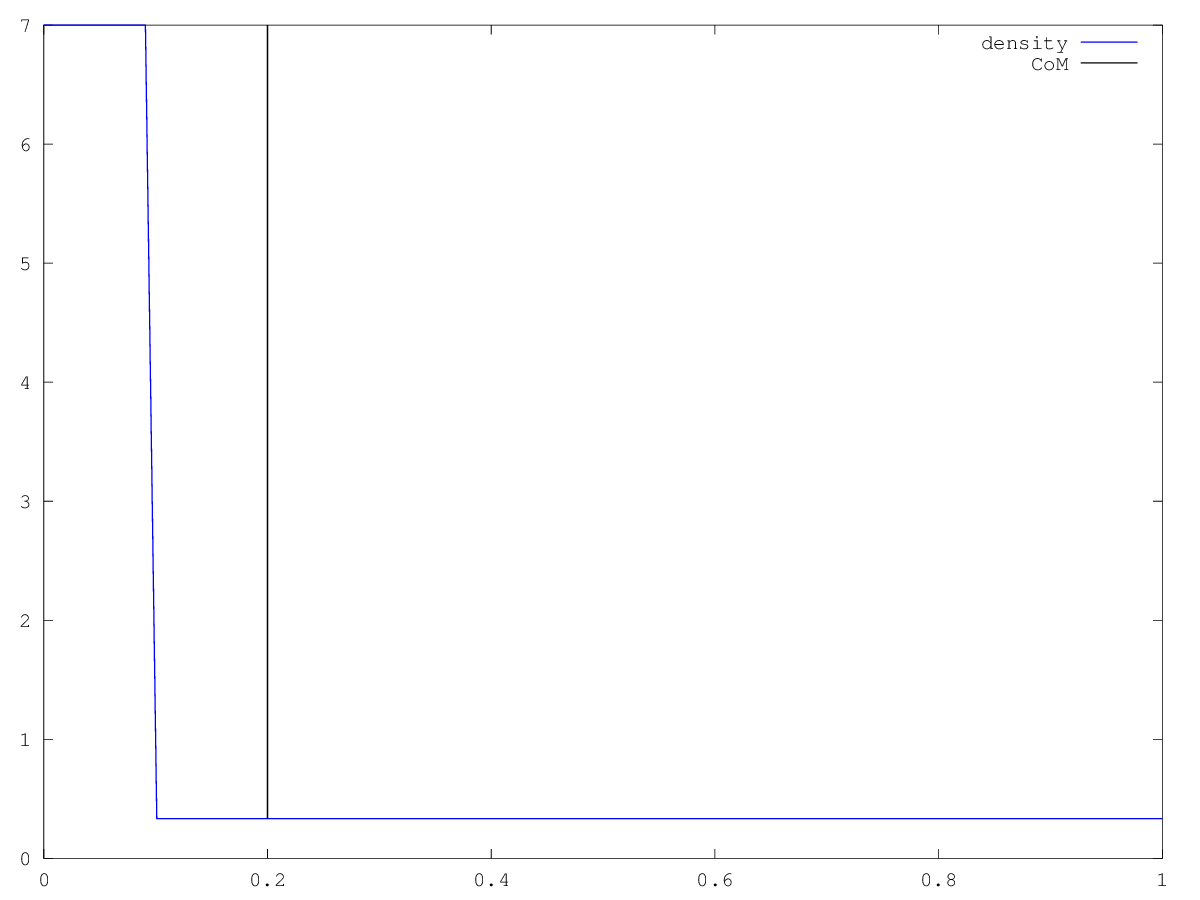
% A normalized density function
density = @(x) (0.5*ones(size(x)) + 10*(x<0.1)).*(x>=0 & x<=1)/1.5;
[Jc, s] = rodmassmatrix (0,1,density);
printf ("Inertia matrix from the extrema : \n")
disp (Jc)
printf ("Sigma value to calculate from center of mass : %g \n",s)
J = rodmassmatrix (s,1,density);
printf ("Inertia matrix from the CoM : \n")
disp (J)
figure (1)
clf
x = linspace (0,1,100)';
h = plot (x,density(x),'b-;density;');
set (h,'linewidth',2)
axis tight
v = axis();
hold on
h = plot ([s s],v([3 4]),'k-;CoM;');
set (h, 'linewidth', 2);
hold off
axis auto
% ----------------------------------------------------------------------------
% This example defines a density function with an accumulation of mass near
% one end of the rod. First we place one of its extrema in the origin. Then
% we use the value of sigma provided by the function to do the same
% calculation form the center of mass.
Produces the following output
Inertia matrix from the extrema : 1.00000 0.20000 0.20000 0.11333 Sigma value to calculate from center of mass : 0.2 Inertia matrix from the CoM : 1.0000e+00 2.7977e-07 2.7977e-07 7.3333e-02
and the following figure
| Figure 1 |
|---|
 |