
|
Octave-Forge - Extra packages for GNU Octave |
| Home · Packages · Developers · Documentation · FAQ · Bugs · Mailing Lists · Links · Code |
|
|
Octave-Forge - Extra packages for GNU Octave |
| Home · Packages · Developers · Documentation · FAQ · Bugs · Mailing Lists · Links · Code |
Function File: [Ax,Ay] = msh2m_displacement_smoothing(msh,k)
Displace the boundary of a 2D mesh setting a spring with force/length constant k along each edge and enforcing equilibrium.
This function builds matrices containing the resulting (linearized) equation for x and y coordinates of each mesh node. Boundary conditions enforcing the displacement (Dirichlet type problem) or the force (Neumann type) at the boundary must be added to make the system solvable, e.g.:
msh = msh2m_structured_mesh(linspace(0,1,10), linspace(0,1,10), 1,1:4,"left"); dnodes = msh2m_nodes_on_sides(msh,1:4); varnodes = setdiff([1:columns(msh.p)],dnodes); xd = msh.p(1,dnodes)'; yd = msh.p(2,dnodes)'; dx = dy = zeros(columns(msh.p),1); dxtot = dytot = -.5*sin(xd.*yd*pi/2); Nsteps = 10; for ii = 1:Nsteps dx(dnodes) = dxtot; dy(dnodes) = dytot; [Ax,Ay] = msh2m_displacement_smoothing(msh,1); dx(varnodes) = Ax(varnodes,varnodes) \ ... (-Ax(varnodes,dnodes)*dx(dnodes)); dy(varnodes) = Ay(varnodes,varnodes) \ ... (-Ay(varnodes,dnodes)*dy(dnodes)); msh.p += [ dx'/Nsteps; dy'/Nsteps ] ; triplot(msh.t(1:3,:)',msh.p(1,:)',msh.p(2,:)'); pause(.01) endforSee also: msh2m_jiggle_mesh.
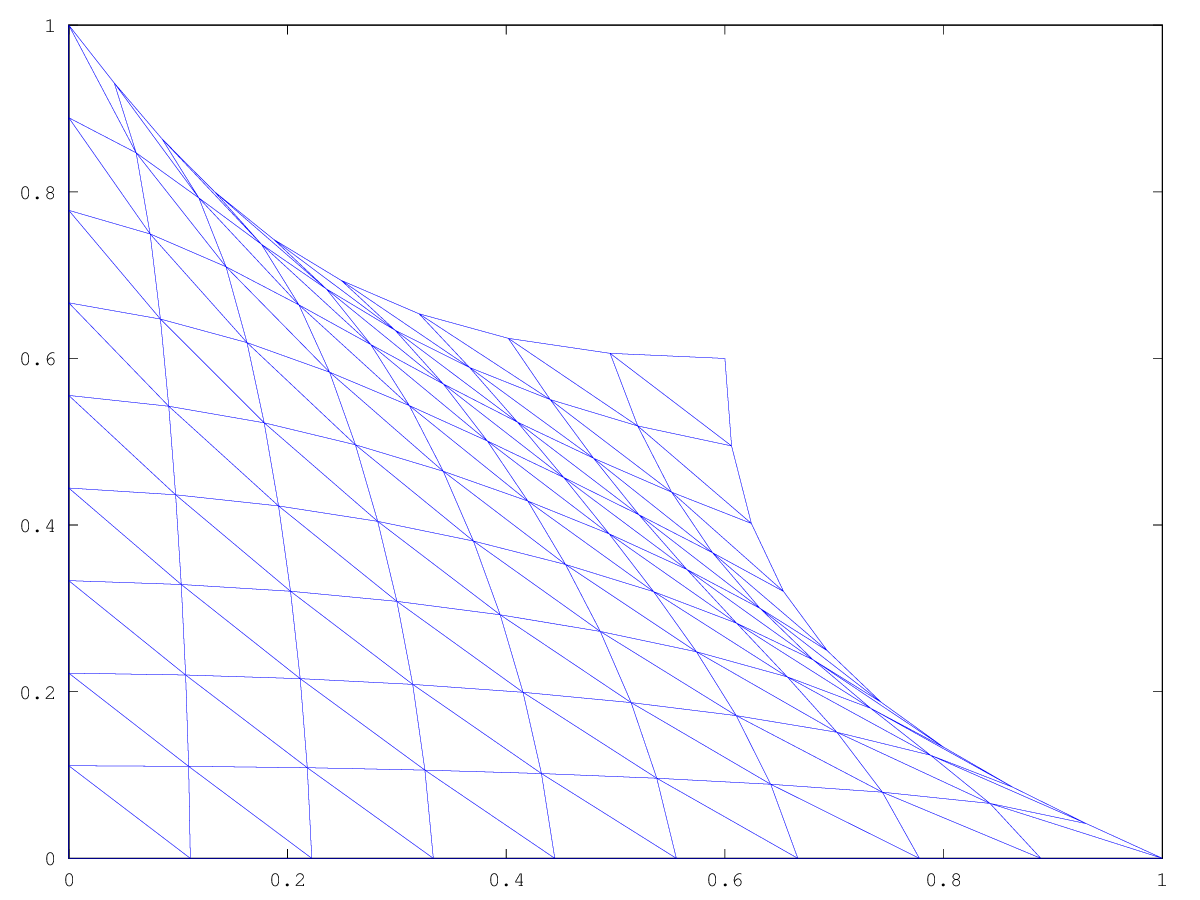
The following code
msh = msh2m_structured_mesh(linspace(0,1,10),
linspace(0,1,10),
1,1:4,"left");
dnodes = msh2m_nodes_on_sides(msh,1:4);
varnodes = setdiff([1:columns(msh.p)],dnodes);
xd = msh.p(1,dnodes)';
yd = msh.p(2,dnodes)';
dy = zeros(columns(msh.p),1);
dx = dy;
dxtot = -.5*sin(xd.*yd*pi/2);
dytot = -.5*sin(xd.*yd*pi/2);
Nsteps = 5;
for ii=1:Nsteps
dx(dnodes) = dxtot;
dy(dnodes) = dytot;
[Ax,Ay] = msh2m_displacement_smoothing(msh,1);
dx(varnodes) = Ax(varnodes,varnodes) \ ...
(-Ax(varnodes,dnodes)*dx(dnodes));
dy(varnodes) = Ay(varnodes,varnodes) \ ...
(-Ay(varnodes,dnodes)*dy(dnodes));
msh.p(1,:) += dx'/Nsteps;
msh.p(2,:) += dy'/Nsteps;
if mod(ii,2)==0
triplot(msh.t(1:3,:)',msh.p(1,:)',msh.p(2,:)');
pause(.01)
endif
endfor
Produces the following figure
| Figure 1 |
|---|
 |
Package: msh