
|
Octave-Forge - Extra packages for GNU Octave |
| Home · Packages · Developers · Documentation · FAQ · Bugs · Mailing Lists · Links · Code |
|
|
Octave-Forge - Extra packages for GNU Octave |
| Home · Packages · Developers · Documentation · FAQ · Bugs · Mailing Lists · Links · Code |
Solve the linear system of equations A * x = b
by means of the Preconditioned Conjugate Gradient iterative method.
The input arguments are
A * x. In principle, A should be
symmetric and positive definite; if pcg finds A not to be
positive definite, a warning is printed and the flag output will be
set.
b - A * x. The iteration stops if
norm (b - A * x) ≤ tol * norm (b).
If tol is omitted or empty then a tolerance of 1e-6 is used.
pcg
P * x = m \ b, with
P = m \ A.
Note that a proper choice of the preconditioner may dramatically improve
the overall performance of the method. Instead of matrices m1 and
m2, the user may pass two functions which return the results of
applying the inverse of m1 and m2 to a vector (usually this is
the preferred way of using the preconditioner). If m1 is omitted or
empty [] then no preconditioning is applied. If m2 is
omitted, m = m1 will be used as a preconditioner.
The arguments which follow x0 are treated as parameters, and passed in
a proper way to any of the functions (A or m) which are passed
to pcg. See the examples below for further details. The output
arguments are
A * x = b.
resvec(i,1) is the Euclidean norm of the residual, and
resvec(i,2) is the preconditioned residual norm, after the
(i-1)-th iteration, i = 1, 2, …, iter+1.
The preconditioned residual norm is defined as
norm (r) ^ 2 = r' * (m \ r) where
r = b - A * x, see also the
description of m. If eigest is not required, only
resvec(:,1) is returned.
eigest(1)
and largest eigest(2) eigenvalues of the preconditioned matrix
P = m \ A. In particular, if no
preconditioning is used, the estimates for the extreme eigenvalues of
A are returned. eigest(1) is an overestimate and
eigest(2) is an underestimate, so that
eigest(2) / eigest(1) is a lower bound for
cond (P, 2), which nevertheless in the limit should
theoretically be equal to the actual value of the condition number.
The method which computes eigest works only for symmetric positive
definite A and m, and the user is responsible for verifying this
assumption.
Let us consider a trivial problem with a diagonal matrix (we exploit the sparsity of A)
n = 10;
A = diag (sparse (1:n));
b = rand (n, 1);
[l, u, p] = ilu (A, struct ("droptol", 1.e-3));
EXAMPLE 1: Simplest use of pcg
x = pcg (A, b)
EXAMPLE 2: pcg with a function which computes
A * x
function y = apply_a (x)
y = [1:N]' .* x;
endfunction
x = pcg ("apply_a", b)
EXAMPLE 3: pcg with a preconditioner: l * u
x = pcg (A, b, 1.e-6, 500, l*u)
EXAMPLE 4: pcg with a preconditioner: l * u.
Faster than EXAMPLE 3 since lower and upper triangular matrices are
easier to invert
x = pcg (A, b, 1.e-6, 500, l, u)
EXAMPLE 5: Preconditioned iteration, with full diagnostics. The preconditioner (quite strange, because even the original matrix A is trivial) is defined as a function
function y = apply_m (x)
k = floor (length (x) - 2);
y = x;
y(1:k) = x(1:k) ./ [1:k]';
endfunction
[x, flag, relres, iter, resvec, eigest] = ...
pcg (A, b, [], [], "apply_m");
semilogy (1:iter+1, resvec);
EXAMPLE 6: Finally, a preconditioner which depends on a parameter k.
function y = apply_M (x, varargin)
K = varargin{1};
y = x;
y(1:K) = x(1:K) ./ [1:K]';
endfunction
[x, flag, relres, iter, resvec, eigest] = ...
pcg (A, b, [], [], "apply_m", [], [], 3)
References:
See also: sparse, pcr.
The following code
## Simplest usage of pcg (see also 'help pcg')
N = 10;
A = diag ([1:N]); b = rand (N, 1);
y = A \ b; # y is the true solution
x = pcg (A, b);
printf ("The solution relative error is %g\n", norm (x - y) / norm (y));
## You shouldn't be afraid if pcg issues some warning messages in this
## example: watch out in the second example, why it takes N iterations
## of pcg to converge to (a very accurate, by the way) solution
Produces the following output
warning: pcg: maximum number of iterations (10) reached warning: pcg: the initial residual norm was reduced 3.31952e+17 times. The solution relative error is 1.23135e-16
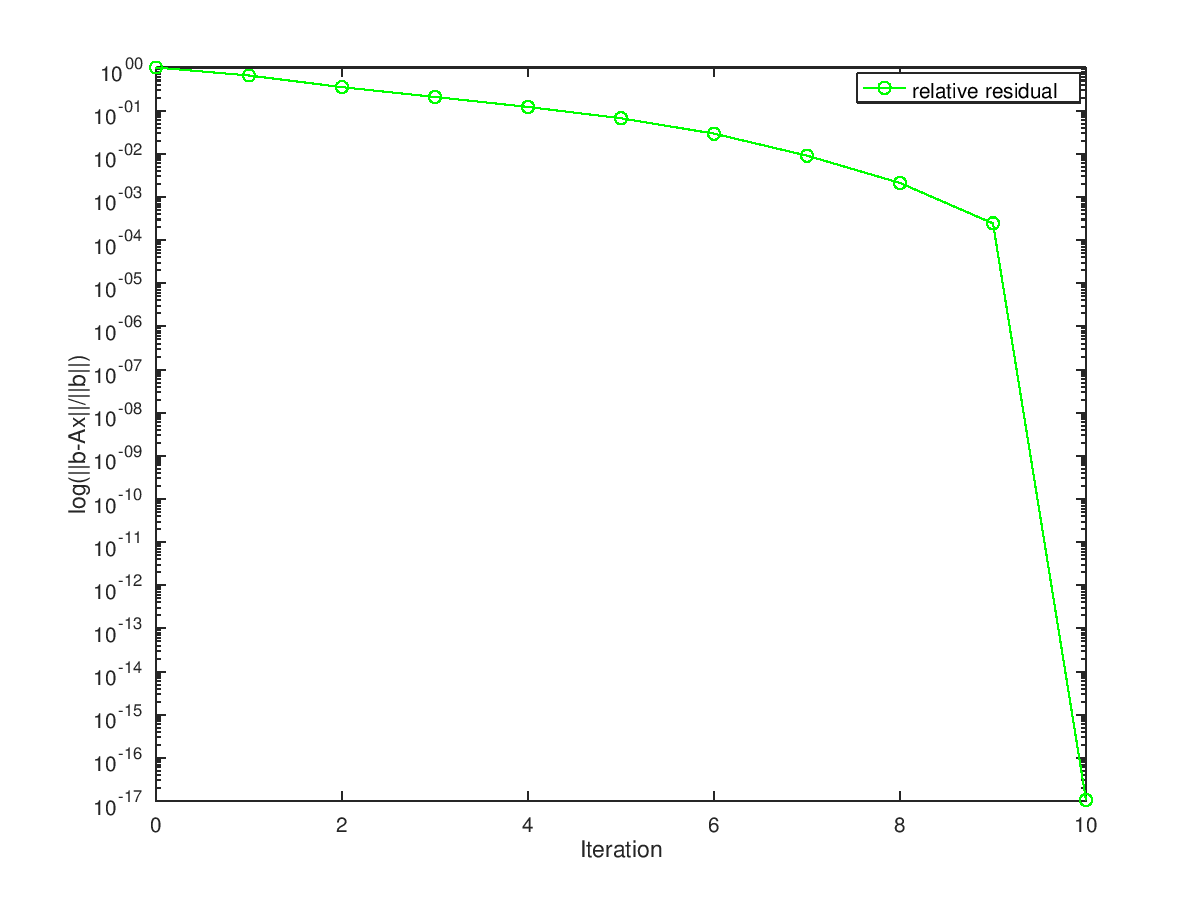
The following code
## Full output from pcg, except for the eigenvalue estimates
## We use this output to plot the convergence history
N = 10;
A = diag ([1:N]); b = rand (N, 1);
X = A \ b; # X is the true solution
[x, flag, relres, iter, resvec] = pcg (A, b);
printf ("The solution relative error is %g\n", norm (x - X) / norm (X));
title ("Convergence history");
semilogy ([0:iter], resvec / resvec(1), "o-g");
xlabel ("Iteration"); ylabel ("log(||b-Ax||/||b||)");
legend ("relative residual");
Produces the following output
The solution relative error is 1.98722e-16
and the following figure
| Figure 1 |
|---|
 |
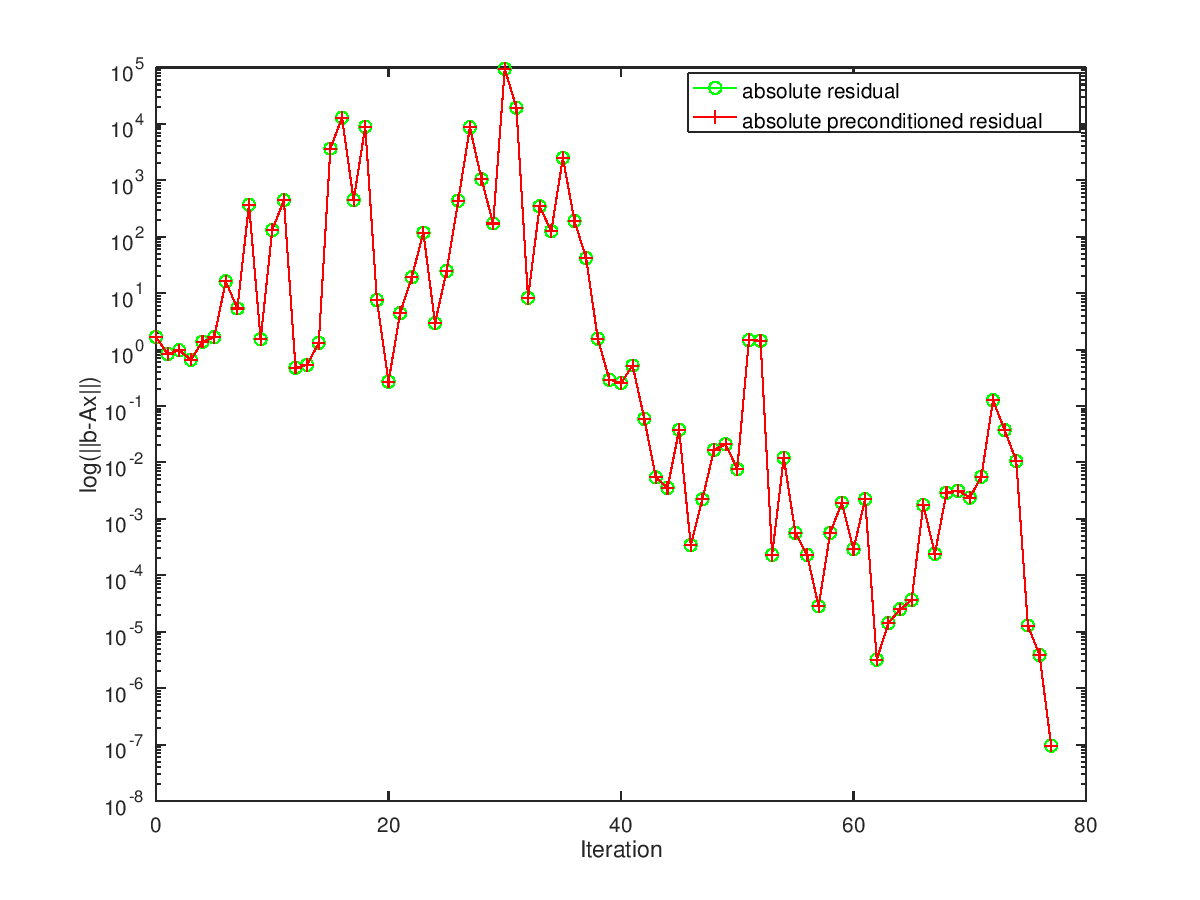
The following code
## Full output from pcg, including the eigenvalue estimates
## Hilbert matrix is extremely ill-conditioned, so pcg WILL have problems
N = 10;
A = hilb (N); b = rand (N, 1);
X = A \ b; # X is the true solution
[x, flag, relres, iter, resvec, eigest] = pcg (A, b, [], 200);
printf ("The solution relative error is %g\n", norm (x - X) / norm (X));
printf ("Condition number estimate is %g\n", eigest(2) / eigest(1));
printf ("Actual condition number is %g\n", cond (A));
title ("Convergence history");
semilogy ([0:iter], resvec, ["o-g";"+-r"]);
xlabel ("Iteration"); ylabel ("log(||b-Ax||)");
legend ("absolute residual", "absolute preconditioned residual");
Produces the following output
The solution relative error is 0.000123006 Condition number estimate is 1.60432e+13 Actual condition number is 1.60244e+13
and the following figure
| Figure 1 |
|---|
 |
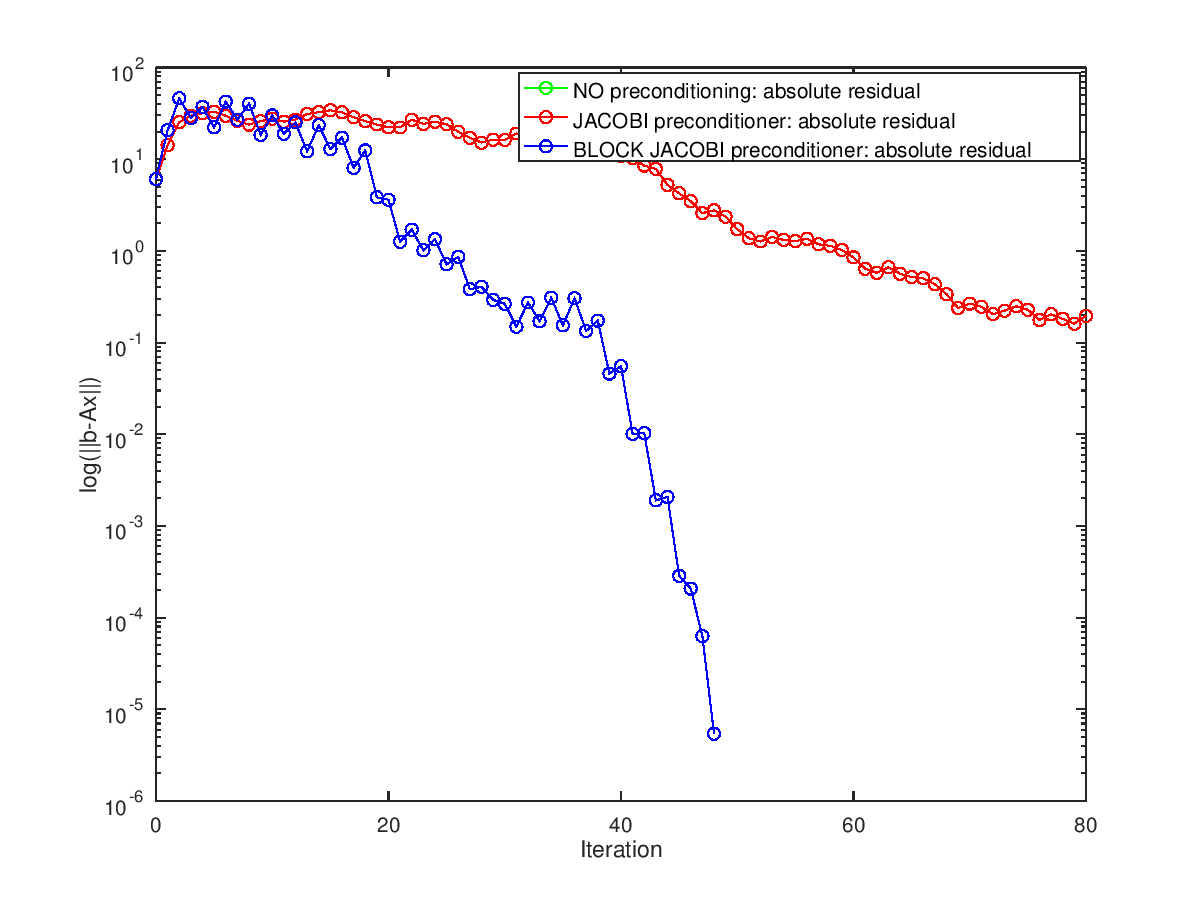
The following code
## Full output from pcg, including the eigenvalue estimates
## We use the 1-D Laplacian matrix for A, and cond(A) = O(N^2)
## and that's the reason we need some preconditioner; here we take
## a very simple and not powerful Jacobi preconditioner,
## which is the diagonal of A.
N = 100;
A = zeros (N, N);
for i = 1 : N - 1 # form 1-D Laplacian matrix
A(i:i+1, i:i+1) = [2 -1; -1 2];
endfor
b = rand (N, 1);
X = A \ b; # X is the true solution
maxit = 80;
printf ("System condition number is %g\n", cond (A));
## No preconditioner: the convergence is very slow!
[x, flag, relres, iter, resvec, eigest] = pcg (A, b, [], maxit);
printf ("System condition number estimate is %g\n", eigest(2) / eigest(1));
title ("Convergence history");
semilogy ([0:iter], resvec(:,1), "o-g");
xlabel ("Iteration"); ylabel ("log(||b-Ax||)");
legend ("NO preconditioning: absolute residual");
pause (1);
## Test Jacobi preconditioner: it will not help much!!!
M = diag (diag (A)); # Jacobi preconditioner
[x, flag, relres, iter, resvec, eigest] = pcg (A, b, [], maxit, M);
printf ("JACOBI preconditioned system condition number estimate is %g\n", eigest(2) / eigest(1));
hold on;
semilogy ([0:iter], resvec(:,1), "o-r");
legend ("NO preconditioning: absolute residual", ...
"JACOBI preconditioner: absolute residual");
pause (1);
## Test nonoverlapping block Jacobi preconditioner: it will help much!
M = zeros (N, N); k = 4;
for i = 1 : k : N # form 1-D Laplacian matrix
M(i:i+k-1, i:i+k-1) = A(i:i+k-1, i:i+k-1);
endfor
[x, flag, relres, iter, resvec, eigest] = pcg (A, b, [], maxit, M);
printf ("BLOCK JACOBI preconditioned system condition number estimate is %g\n", eigest(2) / eigest(1));
semilogy ([0:iter], resvec(:,1), "o-b");
legend ("NO preconditioning: absolute residual", ...
"JACOBI preconditioner: absolute residual", ...
"BLOCK JACOBI preconditioner: absolute residual");
hold off;
Produces the following output
System condition number is 4133.64 System condition number estimate is 4133.21 JACOBI preconditioned system condition number estimate is 4133.21 BLOCK JACOBI preconditioned system condition number estimate is 1034.61
and the following figure
| Figure 1 |
|---|
 |
Package: octave